HK330 কম্পিউটার সিএনসি প্যানেল করাত
পণ্য ভিডিও
কম্পিউটার সিএনসি প্যানেল করাত HK330
1. ইনপুট প্লেটের প্রস্থ অনুসারে, প্রয়োজনীয় প্লেটটি কেটে দ্রুত মূল কার্যক্ষম অবস্থায় ফিরে যান।
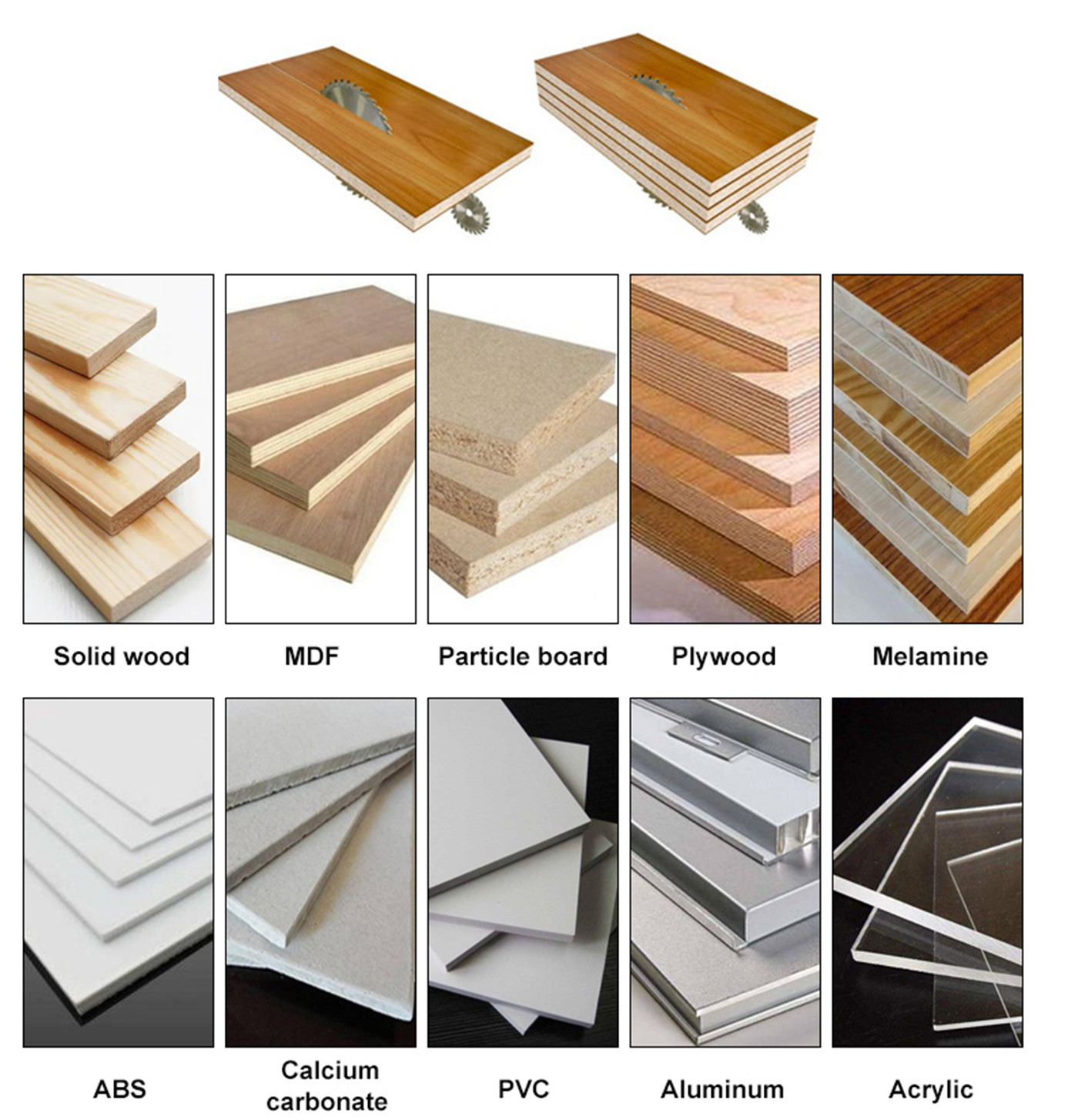
2. কাটার গতি ফ্রিকোয়েন্সি কনভার্টার দ্বারা নিয়ন্ত্রিত হয়, যা বিভিন্ন বেধ এবং বিভিন্ন উপকরণের প্লেটগুলিকে অতিক্রম করতে পারে।
৩. খাওয়ানো বায়ুসংক্রান্ত ভাসমান পুঁতির টেবিল গ্রহণ করে এবং ভারী প্লেট উপাদান পরিবর্তন করা সহজ। রোবটটি স্বয়ংক্রিয়ভাবে খাওয়ায়, কম শ্রম তীব্রতা এবং উচ্চ উৎপাদন দক্ষতা রয়েছে।
৪. কৃত্রিম ত্রুটি দূর করতে এবং মাত্রিক নির্ভুলতা উন্নত করতে আমদানি করা ডেল্টা সার্ভো মোটর ব্যবহার করুন।
প্রযুক্তিগত পরামিতি
| এইচকে৩৩০ | প্যারামিটার |
| সর্বোচ্চ কাটার গতি | ০-৮০ মি/মিনিট |
| সর্বোচ্চ ক্যারিয়ার সর্বোচ্চ গতি | ১০০ মি/মিনিট |
| প্রধান করাত মোটর শক্তি | ১৬.৫ কিলোওয়াট (ঐচ্ছিক ১৮.৫ কিলোওয়াট) |
| মোট শক্তি | ২৬.৫ কিলোওয়াট (ঐচ্ছিক ২৮.৫ কিলোওয়াট) |
| সর্বাধিক কাজের আকার | ৩৩০০L*৩৩০০W*১০০H(মিমি) ঐচ্ছিক ১২০H(মিমি) |
| ন্যূনতম কাজের আকার | ৩৪ লি*৪৫ ওয়াট(মিমি) |
| সামগ্রিক আকার | ৫৩০০L*৫৯৫০W*১৯০০H(মিমি) |

বৃহৎ প্লেট প্রক্রিয়াকরণের প্রয়োজনীয়তা পূরণ করুন, সর্বোচ্চ করাতের আকার ২৮০০ * ২৮০০ মিমি এবং করাতের পুরুত্ব ১০৫ মিমি এবং আরও বিস্তৃত প্রযোজ্যতা সহ

সার্ভো মেকানিক্যাল ক্ল্যাম্প হ্যান্ড ১১টি একক বৃহত্তম ডিজাইনের মেকানিক্যাল ক্লিপ

রোবোটিক আর্মটি উচ্চ-নির্ভুলতা ওয়ার্ম গিয়ার রিডুসার এবং ফিডিং গিয়ার র্যাক গ্রহণ করে, যার কাটার নির্ভুলতা ± 0.1 মিমি।
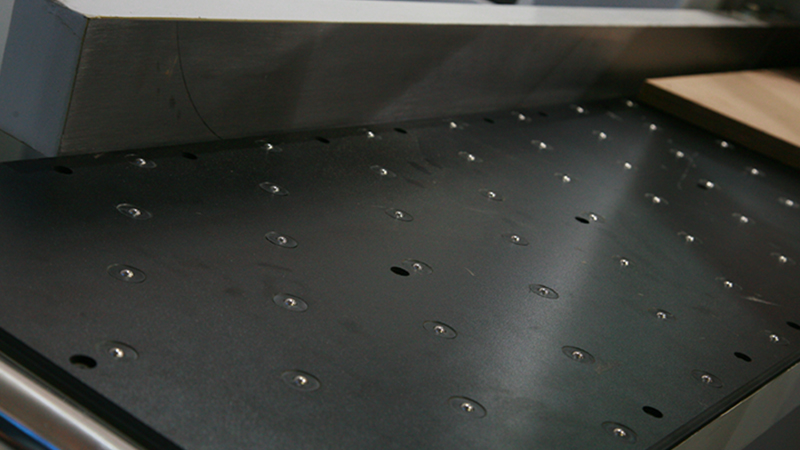
ওয়ার্কটেবিলটি নিউমেটিক ভাসমান প্ল্যাটফর্ম দিয়ে তৈরি। প্যানেলগুলি সরানো খুব সহজ।
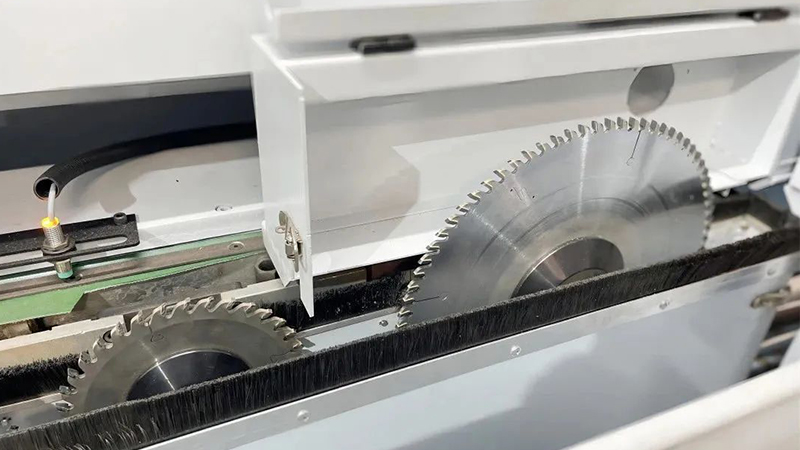
স্কোরিং করাত করাতের চাহিদা অনুযায়ী স্বয়ংক্রিয়ভাবে পরিবর্তন করা যেতে পারে। উচ্চমানের করাতের জন্য প্রধান করাতের সাথে সহযোগিতা করুন।
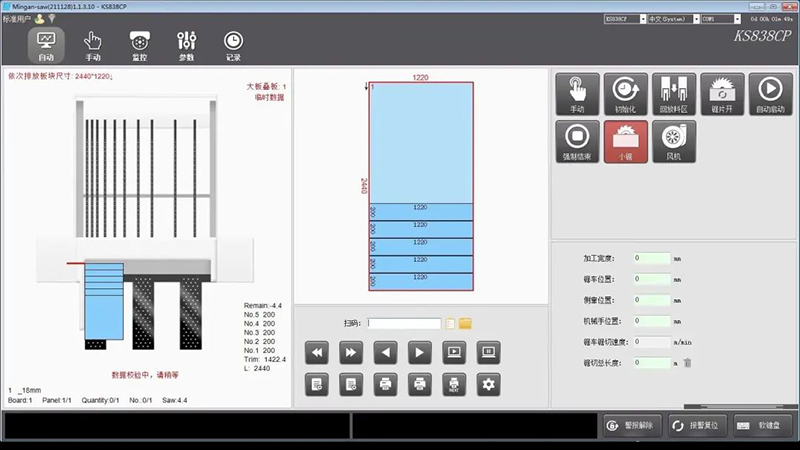
উপাদান বিন্যাসের স্বয়ংক্রিয় অপ্টিমাইজেশনের জন্য ঐচ্ছিক অপ্টিমাইজেশন সফ্টওয়্যার এবং
নমুনা